YOU ARE HERE (2004)
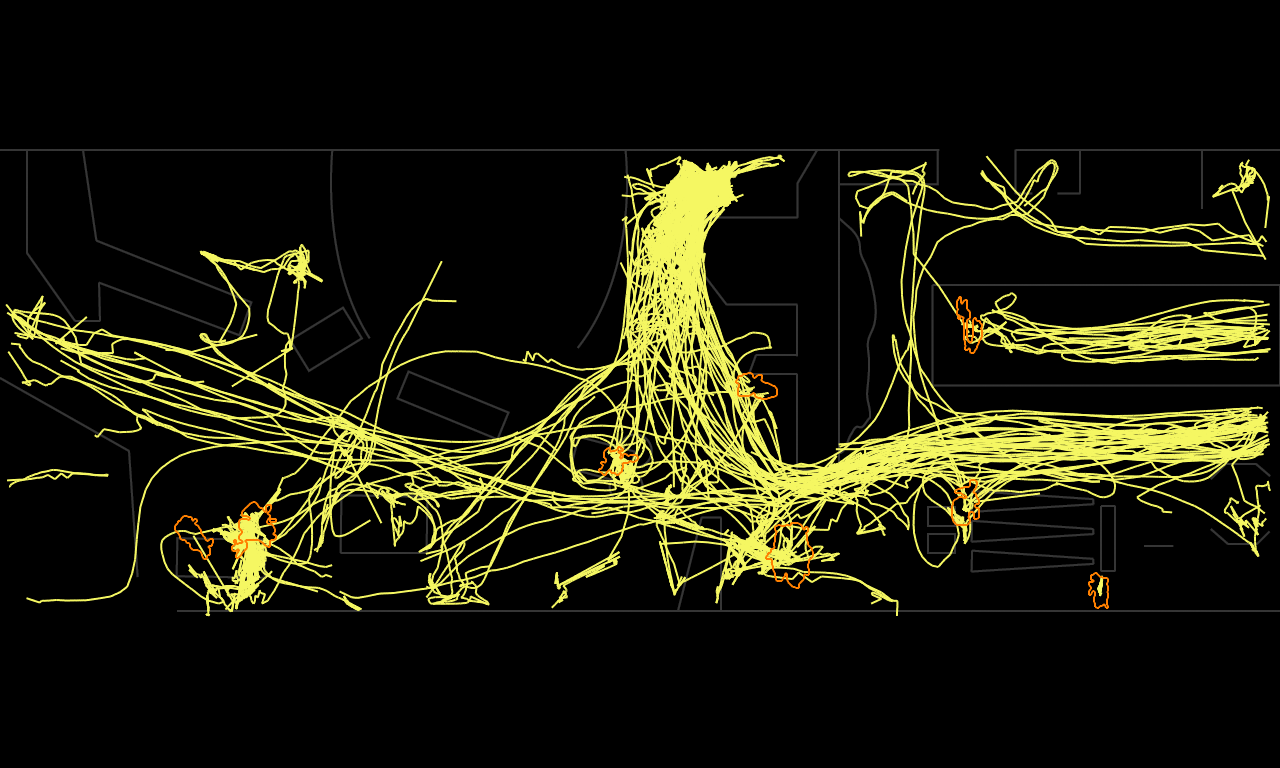
You Are Here tracks and displays the paths of people traveling through a large public space. The system displays the aggregate paths of the last few hundred visitors overlaid with blobs representing the people currently being tracked. The viewer may also gain access to the live video stream from the six cameras above. In this image, the viewer is identified with a large red "you are here" arrow where they can clearly see themselves from above, standing in front of the installation.
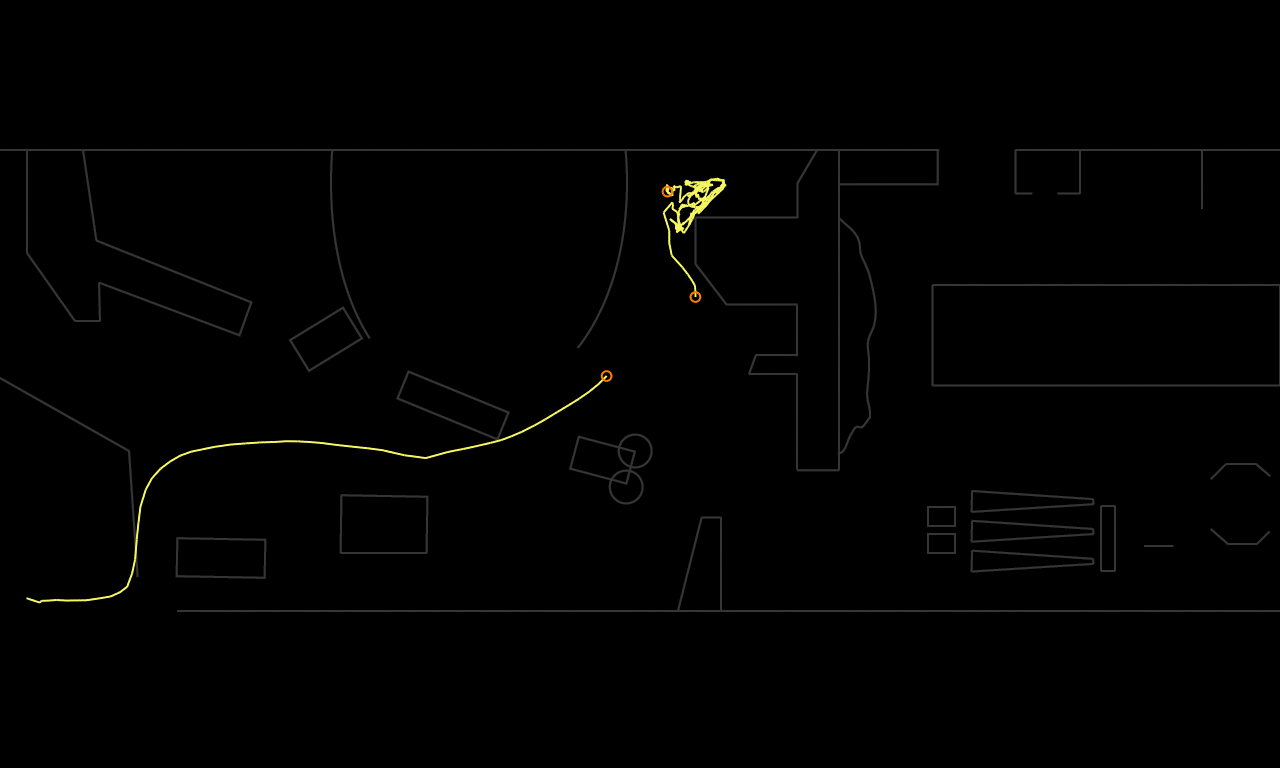
A viewer may scroll backwards in time, revealing where she came from and how her path intersected with others'
The technology of this system is rooted in the surveillance cameras that are now in all of our public spaces: airports, shopping malls, grocery stores, and our streets and parks. The motivations for such public systems range from security to marketing.
Unlike most surveillance systems, this artwork is entirely anonymous: no data is collected and the only use of the information is by museum visitors to track themselves and their friends. You Are Here provides a visceral understanding of surveillance systems' capabilities and a sensual representation of information that is normally accessible only as dry statistics.
This benevolent application of tracking is also meant to show the interconnectedness of viewers' with other visitors to the space by give them a sense of the vibrant, living presence of the streams of people that have passed through the space over the course of just a few minutes.







TECHNICAL EXECUTION
You Are Here consists of two major components: an array of overhead cameras that visually record actions in the hall, and a computer that integrates the images and tracks people's paths. The overhead tracking is accomplished with an array of six networked firewire cameras.
The custom tracking software integrates the cameras' disparate views into a single composite image, correcting for lens distortion and transforming into a common coordinate system. The images below left show the alignment and calibration process while the exhibition hall was still under construction.
Commissioned for the New York Hall of Science Connections exhibition.
CREDITS:
Eric Siegel director
Stephen Uzzo project manager
Scott Snibbe concept, engineering, programming
Jeff Kennedy & Associates exhibit design
Design Craftsmen exhibit fabrication